Rancang Bangun Robot Line Follower Otomatisasi dengan Sensor Cerdas
Keywords:
Robot Line Follower, Arduino, Sensor Inframerah, Mikrokontroler, RobotikaAbstract
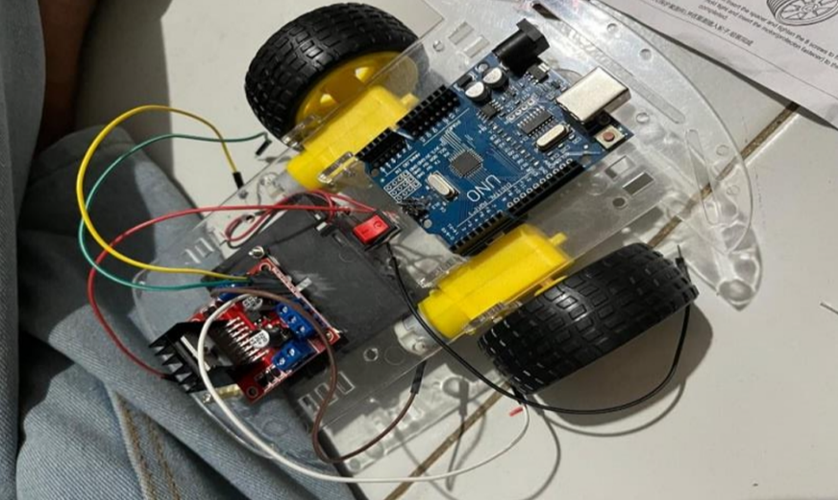
The development of robotics technology has brought various innovations in automation, one of which is the line follower robot. This type of robot is designed to follow a predetermined path using optical sensors to detect the line. This study aims to design, implement, and evaluate the performance of a microcontroller-based line follower robot using Arduino, infrared (IR) sensors, DC motors, L298N motor drivers, and other supporting components. The methodology includes hardware design, PCB fabrication, component assembly, and programming through the Arduino IDE using the teaching (point-to-point) method. The implementation results show that the robot can detect and follow the line effectively after proper sensor calibration and motor speed adjustment. Experimental tests indicate that the system operates in a stable, responsive, and efficient manner under various path conditions. This study contributes to a better understanding of fundamental robotics concepts, microcontroller programming skills, and the integration of sensors and actuators, which are relevant for both educational purposes and simple industrial automation applications.